Evaluation of the Arducam IMX519 - 16mp camera and Picamera v3 - 12mp
This is an evaluation of the new Raspberry PI v3 and Arducam 16mp Cameras.
The Raspberry PI Foundation released a new Picamera v3 - 12mp using a IMX708 sensor. We bought the cameras for 29 Euros, which is roughly the same price as the v2 8mp camera.
Arducam has been releasing many new cameras in the past year. We started evaluating the Arducam IMX519 based 16 megapixel camera with "auto-focus".This camera is relatively cheap, advertised as $24.99, which is cheaper than the average price of the official v2 8mp camera.
Click on the image for full resolution.
You can download full set of examples images taken from 110cm, 100cm and 90cm with both 3 cameras.
Auto Focus
The Raspberry PI v3 camera has autofocus using Fasedetection Autofocus (PDAF), which seems to work really fast and in out initial test work well. For the Arducam, the camera is advertised as "auto-focus", in practice this does not seem to work very well. There is no feedback given when or if a camera is in focus, which makes it very hard to predict when the cameras are in focus and what it is focusing on. The camera does allow you to control the actual focus point (lens position), which would allow us, in a fixed 3D scanner setup, to get consistent and predictable results.Speed of the camera
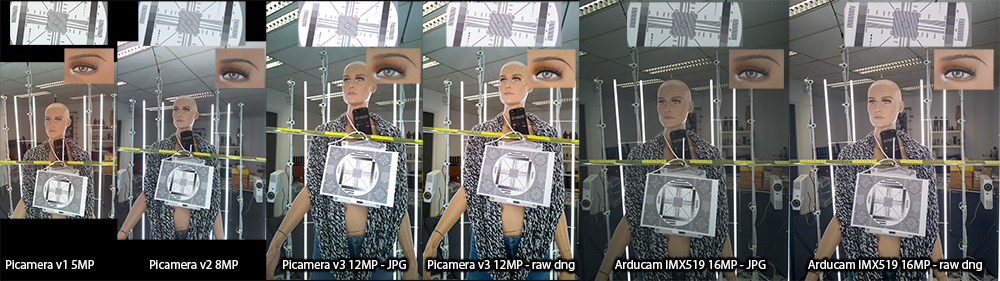
One feature that is important for our scanning method, is that the camera needs to be able to take multiple (full frame) images fast in a row. This allows us to have an image with and without projection and with minimal movement.The camera Arducam has a 10FPS at full frame resolution and the Picamera v3 has a 14.35FPS and on testing this actually works for at least the first 2 frames if we capture the raw frames. The 3rd frame is actually the 4th frame, meaning one frame was dropped. If we try to capture the frames directly to .jpg images, multiple frames are skipped due to the time it takes to compress the images.
Arducam Multiple frame test
PiCamera V3 Multiple frame test

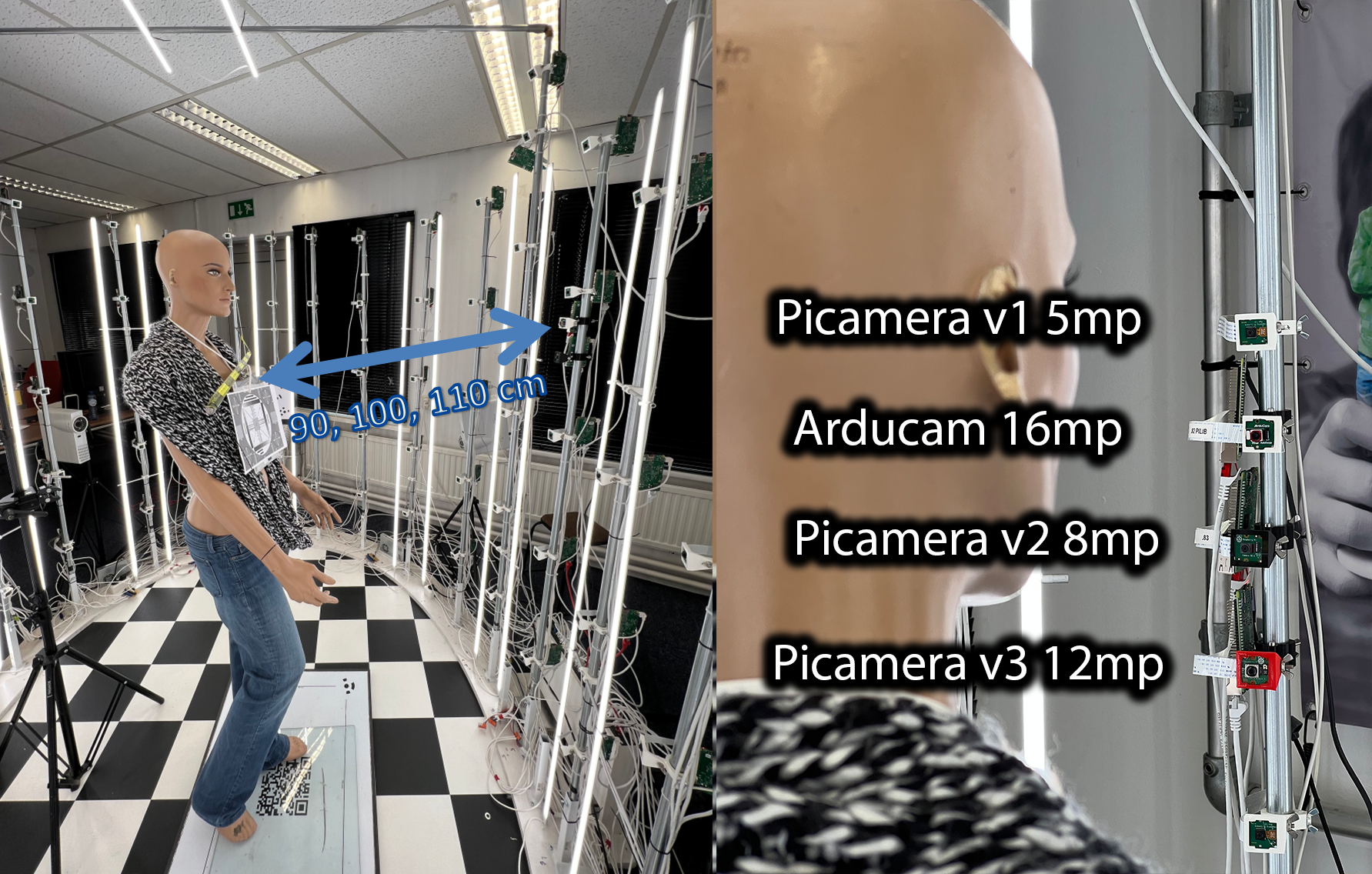
Field of view
The Arducam camera seems to have the same wide field of view as the Picamera v2/8mp. So from the same distance we do really get an increase in resolution. The Picamera v1/5mp has a smaller field of view (more zoomed), which means that vs the v2/8mp camera there realy is no resolution increase when shot from the same distanceThe Picamera V3 seems to have a wider horizontal field of view, but a narrower vertical field of view. The aspect ratio of this camera is quite different. Unlike all the other camera with have an 1:1.33 aspect ratio, this camera has an aspect ratio of 1:1.77
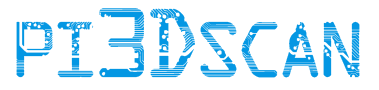
Test setup
We mounted a v1/5mp, v2/8mp, v3/12mp and Arducam/16mp in our scanner on top of each other and made some test shots from 110cm, 100cm and 90cm distance.
Results
As you will see from the images, both camera's raw (.dng) images have a significant improvement in the quality of the images, which should result in more detailed scans. The negative is that the raw files are larger (15mb and 20mb each) and if you want .jpg files, you also need to convert the .dng files first to .jpg which takes time. Reality Capture seems to work fine with the .dng files directly (after installing the windows RAW extension). There is no preview jpg in the raw file, so it is really forced to use the full raw image set.
Click on the image for full resolution.
You can download full set of examples images taken from 110cm, 100cm and 90cm with both 3 cameras.
 Full instructions here:
Full instructions here:  Unfortunately our conclusions are not positive. Some limitations of the new camera:
Unfortunately our conclusions are not positive. Some limitations of the new camera: